
All Images
News Release 14-154
From cognition to control: Fundamental research continues to advance cooperative robots
National Science Foundation and federal partners award $31.5M to advance the nation's co-robots
This material is available primarily for archival purposes. Telephone numbers or other contact information may be out of date; please see current contact information at media contacts.
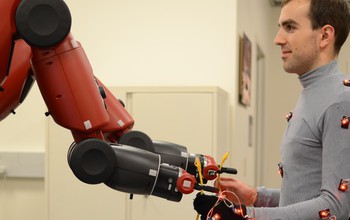
A sample experimental setup for human-robot object handoffs. Each experiment tested 30 randomly ordered handoffs, of which 10 each were generated using the constant, relative and personal schemes. The pose of the human test subject's torso was measured at the moment of the handoff using the eight motion capture markers on the chest and back.
Credit: Aaron Bestick, UC Berkeley
Download the high-resolution JPG version of the image. (881.1 KB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.
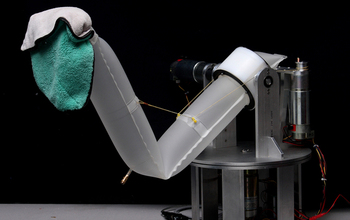
Soft Inflatable Robot Arm. The inflatable arm has no rigid components in its structure and derives strength from pressurized air. The arm is actuated using,cables, motors and pneumatics.
Credit: Sanan/CMU
Download the high-resolution JPG version of the image. (2.4 MB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.
Humanoid robots have potential to use human-scale furniture, ladders, vehicles, etc. However, they still cannot negotiate the disaster-like terrains. The idea of SupraPeds is to increase the locomotion stability by incorporating a pair of actuated smart staffs with vision and force sensing that transforms biped humanoids into multi-legged robots.
Credit: Oussama Khatib, Stanford University;
Shuyun Chung, Stanford University
Download the high-resolution GIF version of the image. (225.4 KB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.

The breadth of fundamental robotics research to be pursued is illustrated in this figure showing the technology space of the National Robotics Initiative. Topics range from cognition and knowledge representation to architectures and control mechanisms; perception; human-robot interaction, cooperation and adaptation; language understanding and production; multi-networked agents; mobility and manipulation; and human-connected cognitive prosthetics, exoskeletons and soft (non-rigid) structures. These areas are inclusive to this program, but by no means exclusive of others.
Credit: NSF
Download the high-resolution JPG version of the image. (46.1 KB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.
Humanoid robots have potential to use human-scale furniture, ladders, vehicles, etc. However, they still cannot negotiate the disaster-like terrains. The idea of SupraPeds is to increase the locomotion stability by incorporating a pair of actuated smart staffs with vision and force sensing that transforms biped humanoids into multi-legged robots.
Credit: Credit: Oussama Khatib, Stanford University; Shuyun Chung, Stanford University
Download the high-resolution JPG version of the image. (157.7 KB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.