
Multimedia Gallery
August 13, 2020
Images and other media in the National Science Foundation Multimedia Gallery are available for use in print and electronic material by NSF employees, members of the media, university staff, teachers and the general public. All media in the gallery are intended for personal, educational and nonprofit/non-commercial use only.
Images credited to the National Science Foundation, a federal agency, are in the public domain. The images were created by employees of the United States Government as part of their official duties or prepared by contractors as "works for hire" for NSF. You may freely use NSF-credited images and, at your discretion, credit NSF with a "Courtesy: National Science Foundation" notation.
Additional information about general usage can be found in Conditions.

{kind=link}
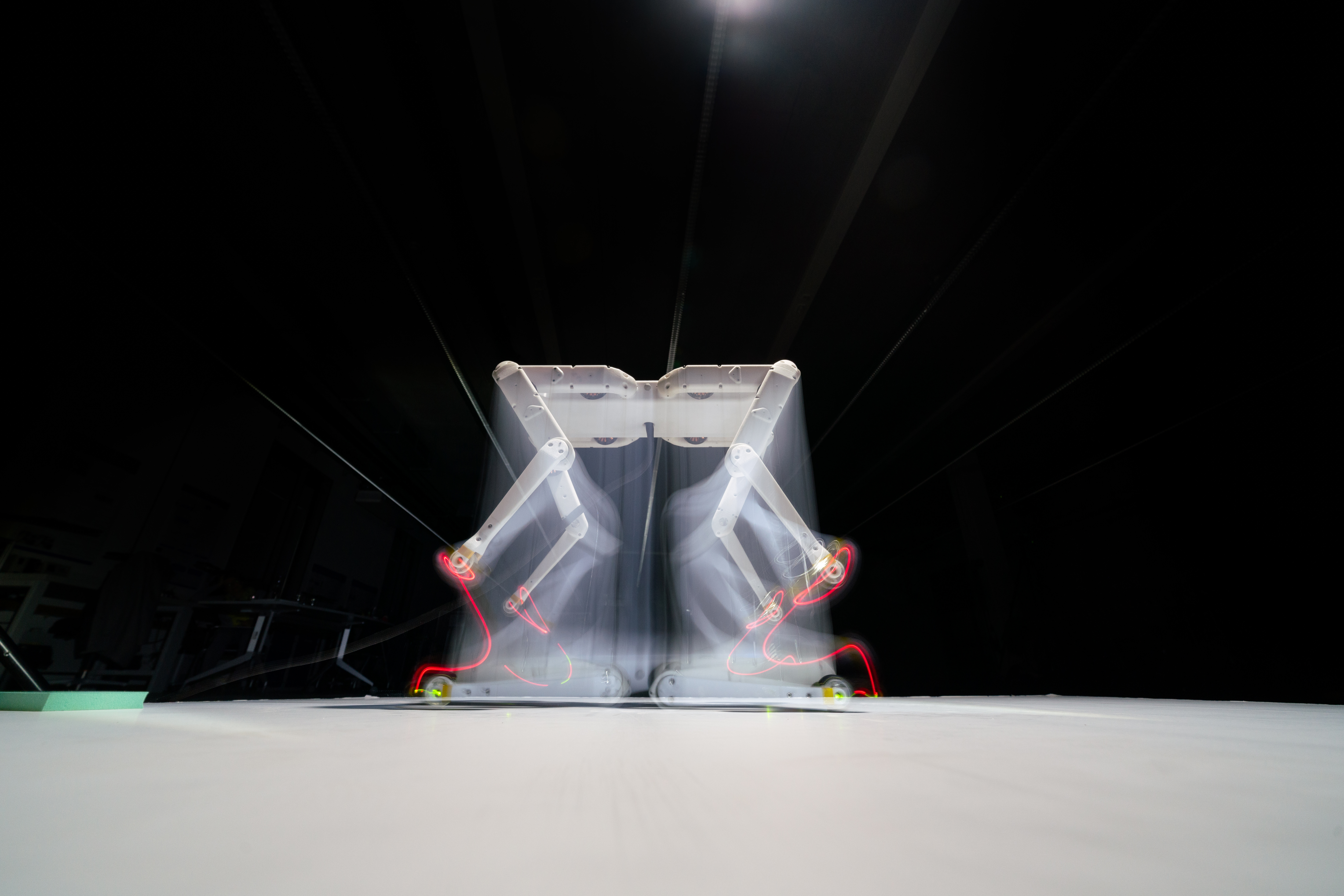
Torque-controlled quadruped robot Solo 8
Solo 8, an open-source, research quadruped robot, can perform a wide range of physical actions.
[Research supported by U.S. National Science Foundation grant CMMI 1825993.]
Learn more in the Max Planck Institute news story Open-source, low-cost, quadruped robot makes sophisticated robotics available to all. (Date image taken: 2018; date originally posted to NSF Multimedia Gallery: Aug. 13, 2020)
Credit: MPI for Intelligent Systems/W. Scheible
Images and other media in the National Science Foundation Multimedia Gallery are available for use in print and electronic material by NSF employees, members of the media, university staff, teachers and the general public. All media in the gallery are intended for personal, educational and nonprofit/non-commercial use only.
Images credited to the National Science Foundation, a federal agency, are in the public domain. The images were created by employees of the United States Government as part of their official duties or prepared by contractors as "works for hire" for NSF. You may freely use NSF-credited images and, at your discretion, credit NSF with a "Courtesy: National Science Foundation" notation.
Additional information about general usage can be found in Conditions.
Also Available:
Download the high-resolution JPG version of the image. (9.8 MB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.