
Multimedia Gallery
{kind=link}
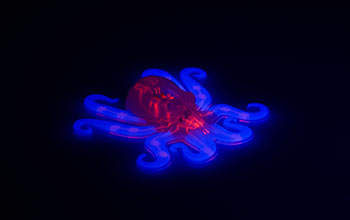
First autonomous, entirely soft robot (Image 2)
An octobot with fluorescently dyed fugitive inks and hyperelastic actuator layers (blue). Octobots are made entirely of soft materials. This prototype, developed by researchers at Harvard University, does not need batteries or electronics to operate. [Image 2 of 3 related images. See Image 3.]
More about this image
Building a soft robot that is entirely compliant has been a challenge for researchers. The electric power and control systems needed, such as batteries and circuit boards, are rigid and until now, soft-bodied robots have been either tethered to an off-board system or rigged with hard components.
Now, a team of researchers at Harvard University has demonstrated the first autonomous, untethered, entirely soft robot. The small, 3D printed robot -- nicknamed the "octobot" -- could pave the way for a new generation of completely soft, autonomous machines.
"One longstanding vision for the field of soft robotics has been to create robots that are entirely soft, but the struggle has always been in replacing rigid components like batteries and electronic controls with analogous soft systems and then putting it all together," said Robert Wood, the Charles River Professor of Engineering and Applied Sciences in the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), who along with Jennifer A. Lewis, the Hansjorg Wyss Professor of Biologically Inspired Engineering at SEAS, led the research. "This research demonstrates that we can easily manufacture the key components of a simple, entirely soft robot, which lays the foundation for more complex designs."
The octobot is pneumatic-based, and powered by gas under pressure. A reaction inside the octobot transforms a small amount of liquid fuel (hydrogen peroxide) into a large amount of gas, which flows into octobot’s arms and inflates them like balloons.
"Through our hybrid assembly approach, we were able to 3D print each of the functional components required within the soft robot body, including the fuel storage, power and actuation, in a rapid manner," said Lewis. "The octobot is a simple embodiment designed to demonstrate our integrated design and additive fabrication strategy for embedding autonomous functionality."
This research was supported in part by the National Science Foundation through the Harvard Materials Research Science and Engineering Center (grant DMR 14-20570.)
To learn more about this research, see the Harvard Gazette story The first autonomous, entirely soft robot; or read the full report in the journal Nature, An integrated design and fabrication strategy for entirely soft, autonomous robots. (Date image taken: February 2016; date originally posted to NSF Multimedia Gallery: Dec. 14, 2016)
Credit: Lori K. Sanders, Michael Wehner and Ryan L. Truby/Harvard University
See other images like this on your iPhone or iPad download NSF Science Zone on the Apple App Store.
Images and other media in the National Science Foundation Multimedia Gallery are available for use in print and electronic material by NSF employees, members of the media, university staff, teachers and the general public. All media in the gallery are intended for personal, educational and nonprofit/non-commercial use only.
Images credited to the National Science Foundation, a federal agency, are in the public domain. The images were created by employees of the United States Government as part of their official duties or prepared by contractors as "works for hire" for NSF. You may freely use NSF-credited images and, at your discretion, credit NSF with a "Courtesy: National Science Foundation" notation.
Additional information about general usage can be found in Conditions.
Also Available:
Download the high-resolution JPG version of the image. (4.8 MB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.